4 Cylindre soumis à la torsion
4.1 État de contraintes dans une éprouvette en torsion
Un arbre cylindrique, de génératrices parallèles à l’axe \(\mathbf{e}_3\), de hauteur \(h\), de section circulaire de rayon \(R\), est limité par la base \(\Gamma_0\) située dans le plan \(x_3 = 0\) et la base \(\Gamma_h\) située dans le plan \(x_3 = h\). On désigne par \(\Gamma_l\) la surface latérale de la pièce.
L’arbre, supposé en équilibre, est soumis en tout point \((x_1, x_2, x_3)\) au champ de contraintes suivant, exprimé dans le repère cartésien \((O,\mathbf{e}_1,\mathbf{e}_2, \mathbf{e}_3)\), l’origine \(O\) du repère étant prise au centre de la base \(\Gamma_0\) :\[\mathbf{\sigma}(x_1, x_2, x_3) = \begin{pmatrix} 0 & 0 & A x_2 \\ 0 & 0 & -A x_1 \\ A x_2 & -A x_1 & 0 \end{pmatrix}\] où \(A\) est un scalaire constant positif.
1. Que peut-on dire des forces volumiques extérieures appliquées à la pièce ?
Dans le domaine \(\Omega\), l’équation d’équilibre local en l’absence d’accélération s’écrit :
\[ \mathrm{div} \, \boldsymbol{\sigma} + \mathbf{f}_v = \mathbf{0} \]
où \(\mathbf{f}_v\) représente la densité de force volumique extérieure.
La divergence d’un tenseur \(\boldsymbol{\sigma}\) en coordonnées cartésiennes est un vecteur dont les composantes sont :
\[ (\mathrm{div} \, \boldsymbol{\sigma})_i = \sum_{j=1}^3 \frac{\partial \sigma_{ij}}{\partial x_j} \]
Calculons chaque composante, pour obtenir :
\[\mathrm{div} \, \boldsymbol{\sigma} = \begin{pmatrix}0 \\0 \\0\end{pmatrix}\]
Conclusion :
L’équation d’équilibre local devient :
\[ \mathbf{f}_v = -\mathrm{div} \, \boldsymbol{\sigma} = \begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix} \]
Cela signifie que les forces volumiques extérieures appliquées à la pièce sont nulles. Sous le champ de contraintes donné, la pièce est donc en équilibre sans nécessiter de forces volumiques extérieures.
- Calculer la densité surfacique d’effort exercée sur la surface latérale \(\Gamma_l\)
4.2 Chargement sur la surface latérale
Sur la surface \(\Gamma_l\)
Exprimons le vecteur force surfacique défini par le vecteur contrainte de Cauchy \(\mathbf{T}\) sur \(\Gamma_l\) :
\[ \mathbf{T}|_{\Gamma_l} = \boldsymbol{\sigma} \cdot \mathbf{n} |_{\Gamma_l} \]
où \(\mathbf{n}\) est la normale unitaire à \(\Gamma_l\), soit \(\mathbf{n} = \mathbf{e}_r\), ce qui donne :
\[ \begin{pmatrix} 0 & 0 & A x_2 \\ 0 & 0 & - A x_1 \\ A x_2 & - A x_1 & 0 \end{pmatrix} \begin{pmatrix} \cos \theta \\ \sin \theta \\ 0 \end{pmatrix} \]
Et sur \(\Gamma_l\), \(x_1=R\cos \theta\) et \(x_2=R\sin \theta\), ainsi nous avons :
\[ \boldsymbol{\sigma}.n |_{\Gamma_l} = \left(\begin{matrix}0\\0\\0\end{matrix}\right) \]
Conclusion: il n’y a pas d’effort extérieur appliqué sur \(\Gamma_l\), la surface latérale est libre d’effort, \(\mathbf{T}|_{\Gamma_l}=\mathbf{0}\).
- Quelles sont les densités surfaciques d’efforts s’exerçant sur les bases \(\Gamma_0\) et \(\Gamma_h\) ?
4.3 Chargement sur les bases
Sur la base \(\Gamma_0\)
Exprimons le vecteur force surfacique défini par le vecteur contrainte de Cauchy \(\mathbf{T}\) sur \(\Gamma_0\) :
\[ \mathbf{T}|_{\Gamma_0} = \boldsymbol{\sigma} \cdot \mathbf{n} |_{\Gamma_0} \]
où \(\mathbf{n}\) est la normale unitaire à \(\Gamma_0\), soit \(\mathbf{n} = -\mathbf{e}_3\), ce qui donne :
\[\boldsymbol{\sigma}.n |_{\Gamma_0} = \left(\begin{matrix}- A r \sin{\left(\theta \right)}\\A r \cos{\left(\theta \right)}\\0\end{matrix}\right)\]
Sur la base \(\Gamma_h\)
Exprimons le vecteur force surfacique défini par le vecteur contrainte de Cauchy \(\mathbf{T}\) sur \(\Gamma_h\) :
\[ \mathbf{T}|_{\Gamma_h} = \boldsymbol{\sigma} \cdot \mathbf{n} |_{\Gamma_h} \]
où \(\mathbf{n}\) est la normale unitaire à \(\Gamma_h\), soit \(\mathbf{n} = \mathbf{e}_3\), ce qui donne :
\[\boldsymbol{\sigma}.n |_{\Gamma_h} = \left(\begin{matrix}A r \sin{\left(\theta \right)}\\- A r \cos{\left(\theta \right)}\\0\end{matrix}\right)\]
- Calculer les éléments de réduction en \(O\) (résultante et moment) du torseur des efforts surfaciques s’exerçant sur la base \(\Gamma_0\). Interpréter la nature des efforts extérieurs agissant sur cet arbre.
4.4 Calcul des éléments de réduction en \(O\)
Nous devons calculer la résultante \(\mathbf{R}_O\) et le moment \(\mathbf{M}_O\) du torseur des efforts surfaciques \(\mathbf{T}\) appliqués sur la base \(\Gamma_0\).
\[ \left\lbrace \mathbf{\mathcal{T}} \right\rbrace = \left\lbrace \begin{array}{c} \mathbf{R}_O \\ \mathbf{M}_O \end{array} \right\rbrace \]
Calcul de la résultante \(\mathbf{R}_O\)
La résultante est définie par :
\[ \mathbf{R}_O = \iint_{\Gamma_0} \boldsymbol{\sigma}.n |_{\Gamma_0} \, ds \]
En remplaçant \(\mathbf{T}\) par son expression donnée et en passant en coordonnées polaires avec \(x_1 = r \cos\theta\) et \(x_2 = r \sin\theta\), nous avons :
\[ \mathbf{R}_O = \int_0^R \int_0^{2\pi} (-A r \sin\theta \, \mathbf{e}_1 + A r \cos\theta \, \mathbf{e}_2) \, r \, d\theta \, dr \]
Or, les intégrales de \(\sin\theta\) et \(\cos\theta\) sur un tour complet valent zéro, ce qui donne :
\[\mathbf{R}_O =\left(\begin{matrix}0\\0\\0\end{matrix}\right)\]
Calcul du moment \(\mathbf{M}_O\)
Le moment en \(O\) est défini par :
\[ \mathbf{M}_O = \iint_{\Sigma_0} \mathbf{OM} \wedge \mathbf{T}|_{\Gamma_0} \, ds \]
où \(\mathbf{OM} = x_1 \mathbf{e}_1 + x_2 \mathbf{e}_2\), donc :
\[ \mathbf{M}_O = \iint_{\Sigma_0} \begin{pmatrix} x_1 \\ x_2 \\ 0 \end{pmatrix} \wedge \begin{pmatrix} - A x_2 \\ A x_1 \\ 0 \end{pmatrix} ds \]
Le produit vectoriel donne :
\[ \mathbf{M}_0 =\left(\begin{matrix}0\\0\\\frac{\pi A R^{4}}{2}\end{matrix}\right) \]
Interprétation des efforts extérieurs
- La résultante est nulle, ce qui signifie qu’aucune force globale ne s’exerce sur \(\Gamma_0\).
- Le moment n’est pas nul, ce qui indique un couple pur agissant sur l’arbre.
- Cela signifie que l’arbre est soumis à un couple moteur ou résistant en \(O\), sans force résultante.
Équilibre :
\[ \left\lbrace \mathbf{\mathcal{T}} \right\rbrace = \left\lbrace \mathbf{0} \right\rbrace \]
Et nous avons :
\[ \left\lbrace \mathbf{\mathcal{T}} \right\rbrace = \left\lbrace \mathbf{\mathcal{T}_O} \right\rbrace_O + \left\lbrace \mathbf{\mathcal{T}_h} \right\rbrace_O + \left\lbrace \mathbf{\mathcal{T}_l} \right\rbrace_O \]
Or, \(\mathbf{T}|_{\Gamma_l}=\mathbf{0}\), ce qui donne :
\[ \left\lbrace \mathbf{\mathcal{T}} \right\rbrace = \left\lbrace \mathbf{\mathcal{T}_O} \right\rbrace_O + \left\lbrace \mathbf{\mathcal{T}_h} \right\rbrace_O \]
Soit,
\[ \mathbf{R}_h = -\mathbf{R}_O = \mathbf{0} \]
et,
\[ \mathbf{M}_h = -\mathbf{M}_O = - \frac{\pi AR^4}{2}\,\mathbf{e}_3 \]
Conclusion
- \(\mathbf{R}_O = 0\) → Pas de force résultante appliquée.
- \(\mathbf{M}_O = \frac{\pi A R^4}{2} \mathbf{e}_3\) → Présence d’un couple pur appliqué en \(O\).
- Interprétation : L’arbre est soumis à un effort extérieur sous forme de couple, typique d’un moteur ou d’une résistance mécanique.
- Déterminer les contraintes principales en tout point de la pièce.
- Sachant que les matériaux fragiles rompent généralement lorsque la contrainte normale atteint une valeur critique \(\sigma_c\), en quel(s) point(s) de l’arbre constitué d’un matériau métallique, cette valeur critique est-elle atteinte ?
- Quelle est la valeur maximale du couple de torsion à ne pas dépasser ?
4.5 Calcul des contraintes principales
Le tenseur des contraintes en tout point de l’arbre est :
\[ \boldsymbol{\sigma} = \begin{pmatrix} 0 & 0 & A x_2 \\ 0 & 0 & -A x_1 \\ A x_2 & -A x_1 & 0 \end{pmatrix} \]
Les contraintes principales sont les valeurs propres de ce tenseur. Pour déterminer les contraintes principales, nous devons résoudre l’équation caractéristique :
\[\text{det}(σ−λI)=0\]
Localisation de la contrainte critique \(\sigma_c\)
La contrainte principale maximale en valeur absolue est \(\sigma_3 = AR\). Cette contrainte atteint sa valeur maximale à la surface de l’arbre, où \(r=R\) (le rayon de l’arbre). Ainsi, la contrainte maximale est :
\[ \sigma_{\text{max}} = A R \]
La rupture se produira lorsque \(\sigma_{\text{max}}=\sigma_c\), soit :
\[ AR = \sigma_c \]
Valeur maximale du couple de torsion
Le moment de torsion \(\mathbf{M}_O\) appliqué à l’arbre est lié au paramètre \(A\) par la relation :
\[ \mathbf{M}_O = \frac{A \pi R^4}{2}\mathbf{e}_3 \]
Pour déterminer la valeur maximale du couple de torsion \(\mathbf{M}_{O, \text{max}}\) que l’arbre peut supporter sans dépasser la contrainte critique \(\sigma_c\), on utilise la relation trouvée précédemment :
\[ A = \frac{\sigma_c}{R} \]
En substituant cette expression de \(A\) dans la formule du moment de torsion, on obtient :
\[ \mathbf{M}_{O, \text{max}} = \frac{\sigma_c \pi R^3}{2}\mathbf{e}_3 \]
qui est le couple de torsion maximal à ne pas dépasser que l’on notera \(T_{max}\).
- Déterminer la direction principale associée à la contrainte principale maximale.
- Sachant qu’en rupture fragile, la surface de rupture est souvent perpendiculaire à la direction principale associée à la contrainte principale maximale, expliquer le faciès de rupture présenté à la figure ci-dessous.
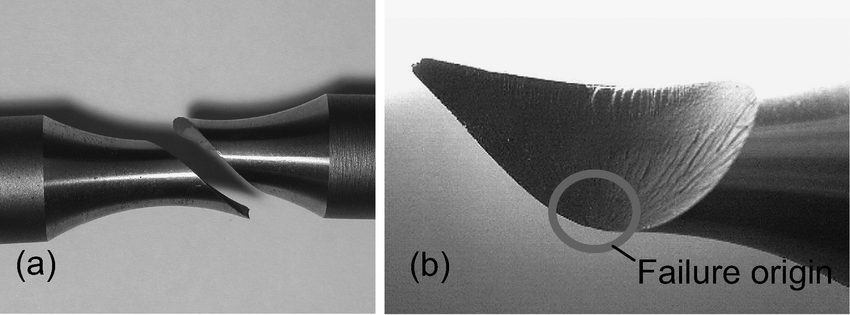
Figure 6.1 : Rupture hélicoïdale d’une éprouvette en fonte sollicitée en torsion. (Shigeo Shimizu)
4.6 Directions principales des contraintes - Vecteurs propres de \(\boldsymbol{\sigma}\)
Pour déterminer les directions principales associées aux contraintes principales, nous devons calculer les vecteurs propres du tenseur des contraintes \(\boldsymbol{\sigma}\).
Calcul des vecteurs propres
Nous avons \(\boldsymbol{\sigma}\nu = \sigma\boldsymbol{\nu}\), ainsi pour chaque valeur propre \(\sigma_i\), nous résolvons l’équation :
\[ (\boldsymbol{\sigma} - \sigma_i \mathbf{I}) \boldsymbol{\nu}_i = 0 \]
où \(\mathbf{I}\) est la matrice identité et \(\boldsymbol{\nu}\) est le vecteur propre associé.
Pour \(\sigma_3 = Ar\) :
\[ (\boldsymbol{\sigma} - A r \mathbf{I}) \boldsymbol{\nu}_3 = 0 \]
avec \(\boldsymbol{\nu}_3\) :
\[ \boldsymbol{\nu}_3 = \begin{pmatrix} \nu_3^{I}\\ \nu_3^{II}\\ \nu_3^{III} \end{pmatrix} \]
où \(\theta\) est l’angle polaire tel que \(x_1 = r\cos\theta\) et \(x_2 = r\sin\theta\).
Après calcul nous obtenons :
\[\nu_{3} = \left(\begin{matrix}\sin{\left(\theta \right)}\\- \cos{\left(\theta \right)}\\1\end{matrix}\right)\]
soit normalisé :
\[\overline{\boldsymbol{\nu}}_{3} = \left(\frac{\sqrt{2}}{2}\right)\mathbf{{e_z}_{}} + \left(- \frac{\sqrt{2}}{2}\right)\mathbf{{e_{\theta}}_{}}\]
Dans le cas d’une rupture fragile, la fissure se propage perpendiculairement à la direction de la contrainte principale maximale. Ici, la contrainte principale maximale \(\sigma_3=AR\) est associée au vecteur propre \(\nu_{3}\), indiquant que la direction principale combine les axes \(x_1\), \(x_2\) et \(x_3\).
La composante \(\nu_{3}\) selon \(x_3\) étant non nulle, la direction principale possède une composante axiale. Ainsi, la surface de rupture s’oriente perpendiculairement à cette direction, ce qui conduit à un faciès de rupture hélicoïdal observé dans les matériaux fragiles soumis à une torsion.
Cette orientation de la fissure s’explique par la distribution non uniforme des contraintes principales, maximales en \(r=R\). La fissure s’initie donc à la surface du cylindre, où la contrainte est la plus élevée. La combinaison d’une fissure se développant dans un plan perpendiculaire au vecteur propre orienté à 45° et de contraintes principales maximales à la surface aboutit à un faciès hélicoïdal.
Cette analyse est cohérente avec les observations expérimentales : sous l’effet d’un couple de torsion, les matériaux fragiles présentent des ruptures suivant des plans inclinés, résultant en une surface de rupture hélicoïdale.
- On considère un matériau fragile avec les caractéristiques suivantes :
- Contrainte critique en cisaillement : \(\sigma_c = 100\) MPa
- Module de cisaillement : \(G = 50\,000\) MPa
- Rayon de l’arbre : \(R = 30\) mm
- Longueur de l’arbre : \(L = 1000\) mm
- Calculer le couple de torsion critique \(T_{\text{c}}\) à ne pas dépasser avant la rupture.
- En déduire l’angle de torsion critique \(\theta_{\text{c}}\) (en degrés).
Formules utiles :
\[ \theta_{\text{max}} = \frac{T_{\text{max}} L}{G J} \]
avec
\[ J = \frac{\pi R^4}{2} \]
4.7 Passage à la simulation
Nous allons maintenant coder un script interactif en Python pour visualiser comment l’angle de torsion varie avec le couple appliqué. Nous afficherons aussi sa valeur maximale \(T_{\text{c}}\) calculée au point 5 :
\[T_{\text{c}} = \frac{\sigma_c \pi R^3}{2}\]
Application numérique: