L’objectif de ce travail pratique dépasse la simple résolution d’un problème de mécanique.
Il s’agit ici de :
découvrir un environnement de calcul basé sur un DAG (Directed Acyclic Graph)
construire un pipeline scientifique complet : simulation → analyse → optimisation
automatiser une étude de convergence de maillage à l’aide d’une approche HPO (Hyperparameter Optimization)
7.2 🧭 Contexte pédagogique
Dans une approche classique en éléments finis : - on choisit un maillage - on exécute une simulation - on ajuste les paramètres manuellement (approche essai/erreur)
Cette démarche est : - coûteuse - peu reproductible - difficilement automatisable
7.3 🚀 Approche proposée
Dans ce TP, on adopte une approche moderne basée sur un pipeline de calcul structuré :
💡 Un workflow automatisé piloté par un DAG
Ce pipeline est exécuté via Link (extension JupyterLab), qui permet de :
structurer le notebook sous forme de graphe de calcul
gérer automatiquement les dépendances entre étapes
éviter les recalculs inutiles (caching)
lancer des optimisations de manière automatisée
7.4 🧪 Problème étudié
On considère une poutre encastrée soumise à une charge, utilisée comme cas test.
Ce problème permet d’illustrer :
la construction d’un modèle éléments finis
l’analyse des résultats mécaniques
la quantification de l’erreur
l’optimisation automatique du maillage
7.5 🧩 Vue globale du pipeline
Le pipeline mis en place suit les étapes suivantes :
Chargement des paramètres du problème
Génération du maillage (nx, ny, nz)
Simulation FEM
Post-traitement (déplacement, contraintes)
Calcul de l’erreur
Optimisation des paramètres de maillage”
7.6 ♻️ Interprétation en DAG
Dans Link, chaque étape devient un nœud du graphe :
Inputs → Mesh → FEM → Post → Erreur → HPO
↑_____________________|
👉 La boucle introduite par le HPO permet d’automatiser la convergence.
7.7 🕸️ Illustration du pipeline
FEniCS-Link
Figure : DAG pour FEniCS
7.8 ⚡ Philosophie DAG
Un DAG (graphe orienté acyclique) permet de structurer un workflow scientifique de manière rigoureuse.
Il apporte plusieurs avantages :
Reproductibilité : chaque étape est explicitement définie
Performance : mise en cache des calculs intermédiaires
Modularité : séparation claire des responsabilités
Scalabilité : possibilité d’exécution parallèle
7.9 🔗 Nœud 1 : imports — Initialisation de l’environnement
Rôle dans le DAG : Nœud racine de configuration logicielle
7.9.1 📌 Description
Cette première sous-étape initialise l’ensemble de l’environnement de calcul scientifique nécessaire à l’exécution du pipeline FEM. Elle assure la disponibilité des bibliothèques de calcul numérique, de simulation et de post-traitement.
7.9.2 ⚙️ Fonction
Assurer la reproductibilité des simulations
Séparer données et implémentation numérique
Code
# Importation des bibliothèques nécessairesimport numpy as npimport matplotlib.pyplot as pltfrom dolfinx import fem, mesh, io, default_scalar_typefrom dolfinx.fem.petsc import LinearProblemfrom mpi4py import MPIimport uflimport jsonfrom petsc4py import PETScprint("Bibliothèques importées avec succès!")import jsondef load_problem():withopen('problem.json', 'r') as f:return json.load(f)problem = load_problem()# Helper pour convertir les valeurs du JSON (gère "" et null)def to_float(val):if val isNoneor val ==""or val =="null":returnNonereturnfloat(val)def to_int(val):if val isNoneor val ==""or val =="null":returnNonereturnint(val)
Rôle dans le DAG : Nœud d’ingestion et structuration des données d’entrée
7.10.1 📌 Description
Cette étape est responsable de la lecture, validation et structuration des paramètres du problème physique. Elle transforme une entrée brute (fichier JSON) en structure exploitable par le solveur FEM.
7.10.2 ⚙️ Fonction
Définir le cadre physique de simulation
Garantir la cohérence des données d’entré
Code
# --- Données générales ---L = to_float(problem['length'])if L isNone:raiseValueError("L (length) is missing in JSON")E = problem['material']['E']if E isNone:raiseValueError("E (Young modulus) is missing in JSON")E =float(E)nu = to_float(problem['material']['nu'])# --- Supports ---supportA = problem['supports']['A']supportB = problem['supports']['B']# --- Section ---section = problem["section"]I = to_float(section["I"])if I isNone:raiseValueError("I (moment of inertia) is missing in JSON")W = to_float(section.get("W"))h_equiv = to_float(section.get("h_equiv"))b = to_float(section.get("b"))h = to_float(section.get("h"))r = to_float(section.get("r"))r_int = to_float(section.get("r_int"))tw = to_float(section.get("tw"))tf = to_float(section.get("tf"))# --- Load ---load = problem["load"]load_type = load["type"]P = to_float(load.get("P"))a = to_float(load.get("xP"))q = to_float(load.get("q"))x_start = to_float(load.get("x_start"))x_end = to_float(load.get("x_end"))
💡 Point clé :
Ces paramètres peuvent être pilotés automatiquement par Link En particulier :
𝑛𝑥,𝑛𝑦,𝑛𝑧 → variables d’optimisation
propriétés physiques → constantes
7.11 🔗 Nœud 3 : Mesh — Génération du maillage
Rôle dans le DAG : Nœud d’hyperparamétrisation du modèle numérique
7.11.1 📌 Description
Les paramètres de maillage (nx, ny, nz) ne sont plus considérés comme fixes, mais comme des hyperparamètres du pipeline de simulation.
7.11.2 ⚙️ Fonction
Cette approche permet à l’environnement Link de :
explorer automatiquement différentes configurations de maillage
évaluer l’impact de la discrétisation sur la précision numérique
comparer les solutions obtenues pour différents niveaux de raffinement
identifier un compromis optimal entre coût de calcul et précision
Rôle dans le DAG : Nœud de discrétisation des inconnues
7.12.1 📌 Description
Cette étape consiste à définir l’espace fonctionnel dans lequel la solution du problème sera recherchée. Dans le cadre de l’élasticité linéaire 3D, le champ inconnu est le déplacement vectoriel. On introduit donc un espace de fonctions vectorielles basé sur des éléments finis de type Lagrange. Les fonctions de test et d’essai sont également définies à ce stade, conformément à la formulation variationnelle.
Les conditions aux limites sont imposées afin de garantir l’unicité et la pertinence physique de la solution. Dans ce cas, un encastrement est appliqué à une extrémité de la poutre, imposant un déplacement nul.
7.14 🔗 Nœud 6 : Loads — Application des chargements
Rôle dans le DAG : Nœud de sollicitation externe
7.14.1 📌 Description
Cette étape introduit les actions mécaniques appliquées à la structure. Dans ce cas, une charge est appliquée localement sur une zone de la surface. La force est convertie en traction surfacique équivalente, compatible avec la formulation faible.
Rôle dans le DAG : Nœud de modélisation constitutive du matériau
7.15.1 📌 Description
Ce nœud définit la loi de comportement du matériau, c’est-à-dire la relation entre les déformations et les contraintes dans la structure. La relation contrainte–déformation est donnée par la loi de Hooke généralisée, formulée à l’aide des coefficients de Lamé.
7.15.2 ⚙️ Fonction
Définir la physique du matériau
Relier le champ de déplacement aux contraintes internes
Fournir l’expression du tenseur des contraintes pour la formulation faible
Code
# =========================# MÉCANIQUE# =========================mu = E / (2* (1+ nu))lmbda = E * nu / ((1+ nu) * (1-2* nu))def epsilon(u):return ufl.sym(ufl.grad(u))def sigma(u):return ( lmbda * ufl.tr(epsilon(u)) * ufl.Identity(3)+2* mu * epsilon(u) )
7.16 🔗 Nœud 8 : Formumation — Formulation faible
Rôle dans le DAG : Nœud de traduction mathématique du problème physique
7.16.1 📌 Description
Ce nœud définit la loi de comportement du matériau, c’est-à-dire la relation entre les déformations et les contraintes dans la structure. La relation contrainte–déformation est donnée par la loi de Hooke généralisée, formulée à l’aide des coefficients de Lamé.
7.16.2 ⚙️ Fonction
Définir la physique du matériau
Relier le champ de déplacement aux contraintes internes
Fournir l’expression du tenseur des contraintes pour la formulation faible
Le problème variationnel est discrétisé et transformé en un système linéaire de la forme \(𝐾𝑈=𝐹\). Ce système est ensuite résolu à l’aide d’un solveur basé sur PETSc.
7.19 🔗 Nœud 11 : Visualisation — Visualisation des réultats
Rôle dans le DAG : Nœud de restitution et d’interprétation visuelle
7.19.1 📌 Description
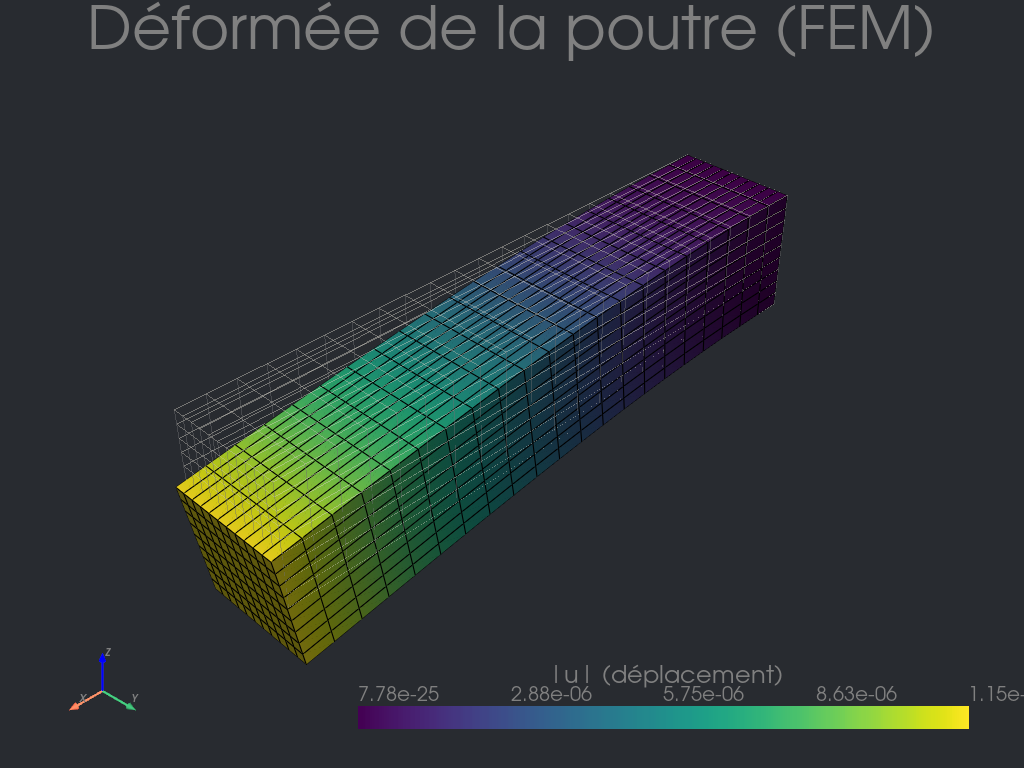
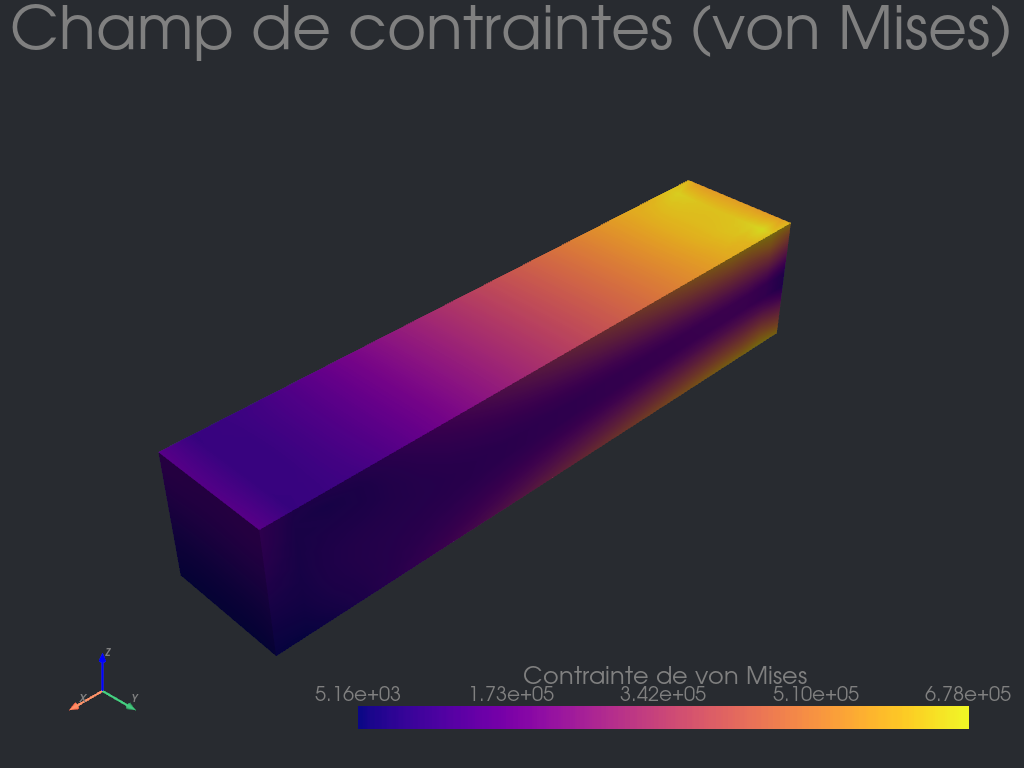
Les résultats sont projetés sur une représentation graphique du maillage afin de visualiser :
la déformée de la structure
le champ de déplacement
le champ de contraintes
7.19.2 ⚙️ Fonction
Faciliter l’interprétation des résultats
Valider qualitativement le comportement mécanique
Produire des supports visuels pour l’analyse
7.20 🔗 Nœud 12 : Comaparison — Comparaison à la théorie
Rôle dans le DAG : Nœud d’analyse ciblée et de validation physique
7.20.1 📌 Description
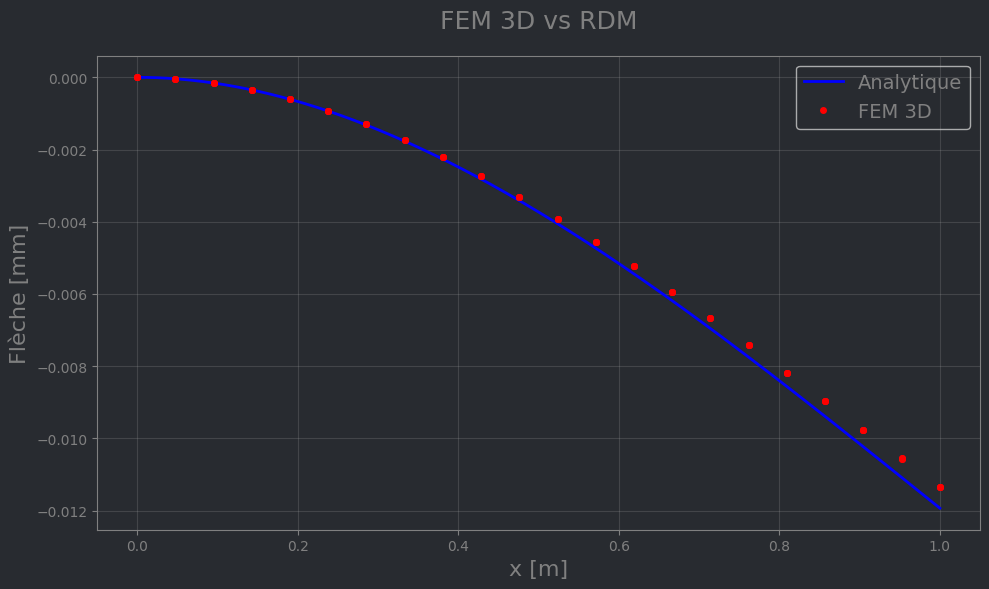
Ce nœud calcule l’écart entre la solution numérique obtenue par la méthode des éléments finis et une solution de référence analytique. Il introduit une métrique quantitative de précision, appelée erreur relative, qui permet d’évaluer la qualité de la simulation.
7.20.2 ⚙️ Fonction
Valider localement la solution numérique
Comparer FEM 3D vs modèle simplifié (RDM)
Mettre en évidence les écarts liés au maillage
FEniCS-Link
7.21 🔗 Nœud 13 : error — Évaluation de l’erreur
Rôle dans le DAG : Nœud d’évaluation et de pilotage de l’optimisation
7.21.1 📌 Description
Ce nœud calcule l’écart entre la solution numérique obtenue par la méthode des éléments finis et une solution de référence analytique. Il introduit une métrique quantitative de précision, appelée erreur relative, qui permet d’évaluer la qualité de la simulation.
=== Comparaison flèche max. ===
Analytique: -11.93460 mm
FEM 3D: -11.38589 mm
Erreur: 4.60 %
np.float64(4.597580655491677)
7.22 🧠 Résumé du projet
Ce travail s’inscrit dans l’exploration d’un environnement de calcul scientifique basé sur des graphes orientés acycliques (DAG) appliqués à la simulation par éléments finis et à l’optimisation automatique de paramètres.
L’objectif principal est d’utiliser une approche de type workflow pour structurer un pipeline complet allant de la définition du problème mécanique jusqu’à l’optimisation des paramètres de maillage.
7.22.1 ⚙️ Environnement de calcul basé sur DAG
L’extension Link pour JupyterLab permet de transformer un notebook classique en un graphe de calcul structuré, dans lequel chaque cellule devient un nœud du DAG.
Cette approche apporte plusieurs avantages :
exécution contrôlée des dépendances
mise en cache des résultats intermédiaires
réduction des recomputations inutiles
meilleure traçabilité des pipelines numériques
possibilité de parallélisation de certaines étapes
Dans ce cadre, un workflow scientifique n’est plus linéaire, mais devient un système structuré et reproductible.
7.22.2 🔬 Application au problème FEM
Le cas étudié est celui d’une poutre en flexion résolue par éléments finis (FEniCSx).
Le pipeline complet inclut :
génération du maillage paramétré par \((n_x, n_y, n_z)\)
résolution du problème mécanique linéaire
calcul du champ de déplacement
post-traitement (flèche, contraintes de von Mises)
extraction de métriques d’erreur
7.22.3 📊 Optimisation et étude de convergence
Les paramètres de maillage \((n_x, n_y, n_z)\) sont considérés comme des hyperparamètres.
La sortie du système est une fonction objectif :
erreur relative entre solution FEM et solution analytique
Cette erreur est utilisée dans un processus de Hyperparameter Optimization (HPO) afin de :
minimiser l’erreur numérique
analyser la convergence du maillage
identifier un compromis précision / coût de calcul
7.22.4 🧩 Apport du DAG dans ce contexte
L’utilisation d’un DAG permet de structurer naturellement le workflow :
chaque étape de la simulation devient un nœud
les dépendances sont explicites
les résultats sont réutilisables via caching
les modifications locales ne déclenchent pas tout le pipeline
Cela transforme une étude FEM classique en un pipeline computationnel reproductible et optimisable.
7.23 💡 Conclusion
Ce projet illustre comment un environnement basé sur DAG peut améliorer les workflows de simulation numérique en :
automatisant les études de convergence
structurant les calculs FEM
facilitant l’intégration de méthodes d’optimisation (HPO)
réduisant les coûts de recalcul
Il ouvre ainsi la voie vers des approches plus robustes de simulation scientifique pilotée par graphes et optimisation automatique.
7.23.1 🐙 Accès au projet et apprentissage
L’ensemble du projet est disponible en open source sur GitHub : fenics-link et peut être exécuté directement via un environnement Docker, sans installation locale.
Les utilisateurs souhaitant tester concrètement le workflow (DAG + FEM + optimisation) peuvent ainsi explorer l’outil de manière interactive et intuitive.
Pour des raisons de lisibilité du document, les démonstrations détaillées de l’interface Link et des expérimentations HPO ne sont pas reproduites ici.
7.23.2 🎓 Ressources et accompagnement
Pour les utilisateurs souhaitant une démonstration guidée ou une prise en main plus approfondie :
une page de contact est disponible pour obtenir des explications complémentaires : contact
des tutoriels et webinaires peuvent être proposés sur demande
un webinaire sera organisé dès qu’un seuil d’intérêt suffisant sera atteint (≈ 10 participants)